# 영상의 기하학적 변환
import cv2
import numpy as np### 회전 변환
src = cv2.imread('./data/tekapo.bmp')
h, w = src.shape[0], src.shape[1]
cp = h/2, w/2
M = cv2.getRotationMatrix2D(cp, 20, 0.5)
dst = cv2.warpAffine(src, M, (0,0))
cv2.imshow('src', src)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()-->


# 참고
dst1 = cv2.rotate(src, cv2.ROTATE_90_CLOCKWISE)
dst2 = cv2.rotate(src, cv2.ROTATE_90_COUNTERCLOCKWISE)
cv2.imshow('src', src)
cv2.imshow('dst1', dst1)
cv2.imshow('dst2', dst2)
cv2.waitKey()
cv2.destroyAllWindows()-->



### 대칭 변환
src = cv2.imread('./data/eastsea.bmp')
cv2.imshow('src', src)
for flip_code in [1, 0, -1]:
dst = cv2.flip(src, flip_code)
desc = "flip code: %d"% flip_code
cv2.putText(dst, desc, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1.0, (255, 0, 0), 1, cv2.LINE_AA)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()-->




# 투시변환
import syscnt = 0
src_pts = np.zeros([4,2], dtype=np.float32)
def on_mouse(event, x, y, flags, param):
global src_pts, cnt
if event == cv2.EVENT_LBUTTONDOWN:
if cnt < 4:
src_pts[cnt, :] = np.array([x, y], dtype=np.float32)
cnt += 1
cv2.circle(src, (x, y), 5, (0, 0, 255), -1)
cv2.imshow('src', src)
if cnt == 4:
w, h = (200, 300)
dst_pts = np.array([[0,0], [w-1, 0], [w-1, h-1], [0, h-1]], dtype=np.float32)
M = cv2.getPerspectiveTransform(src_pts, dst_pts)
dst = cv2.warpPerspective(src, M, (w, h))
cv2.imshow('dst', dst)
src = cv2.imread('./data/card.bmp')
if src is None:
print('Image load failed')
sys.exit()
cv2.imshow('src', src)
cv2.setMouseCallback('src', on_mouse)
cv2.waitKey()
cv2.destroyAllWindows()-->


# 에지 검출과 응용
### 마스크 기반 에지 검출 - 소벨 마스크
src = cv2.imread('./data/lenna.bmp', cv2.IMREAD_GRAYSCALE)
if src is None:
print("image load failed")
sys.exit()
mx = np.array(
[[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]], dtype=np.float32)
my = np.array(
[[-1, -2, -1],
[0, 0, 0],
[1, 2, 1]], dtype=np.float32)
dx = cv2.filter2D(src, -1, mx, delta=128)
dy = cv2.filter2D(src, -1, my, delta=128)
# dx = cv2.Sobel(src, -1, 1, 0, delta=128)
# dy = cv2.Sobel(src, -1, 0, 1, delta=128)
cv2.imshow('src', src)
cv2.imshow('dx', dx)
cv2.imshow('dy', dy)
cv2.waitKey()
cv2.destroyAllWindows()-->



src = cv2.imread('./data/lenna.bmp', cv2.IMREAD_GRAYSCALE)
if src is None:
print("image load failed")
sys.exit()
dx = cv2.Sobel(src, cv2.CV_32FC1, 1, 0)
dy = cv2.Sobel(src, cv2.CV_32FC1, 0, 1)
fmag = cv2.magnitude(dx, dy)
mag = np.clip(fmag, 0, 255).astype(np.uint8)
_, edge = cv2.threshold(mag, 160, 255, cv2.THRESH_BINARY)
cv2.imshow('src', src)
cv2.imshow('mag', mag)
cv2.imshow('edge', edge)
cv2.waitKey()
cv2.destroyAllWindows()-->



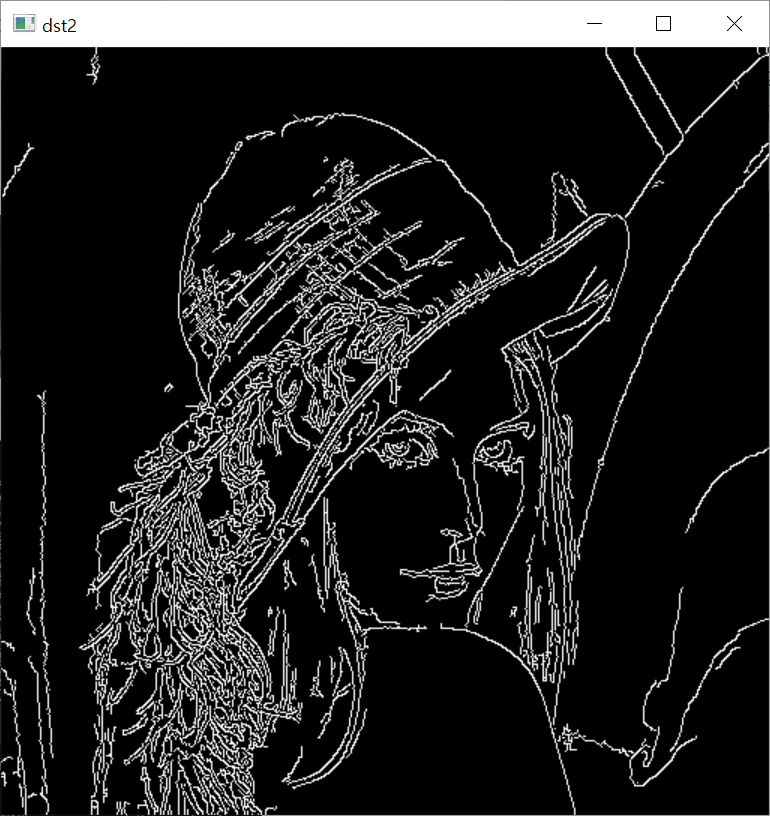
### 캐니 에즈 검출기
src = cv2.imread('./data/lenna.bmp', cv2.IMREAD_GRAYSCALE)
if src is None:
print("image load failed")
sys.exit()
dst1 = cv2.Canny(src, 50, 100)
dst2 = cv2.Canny(src, 50, 150)
cv2.imshow('src', src)
cv2.imshow('dst1', dst1)
cv2.imshow('dst2', dst2)
cv2.waitKey()
cv2.destroyAllWindows()-->


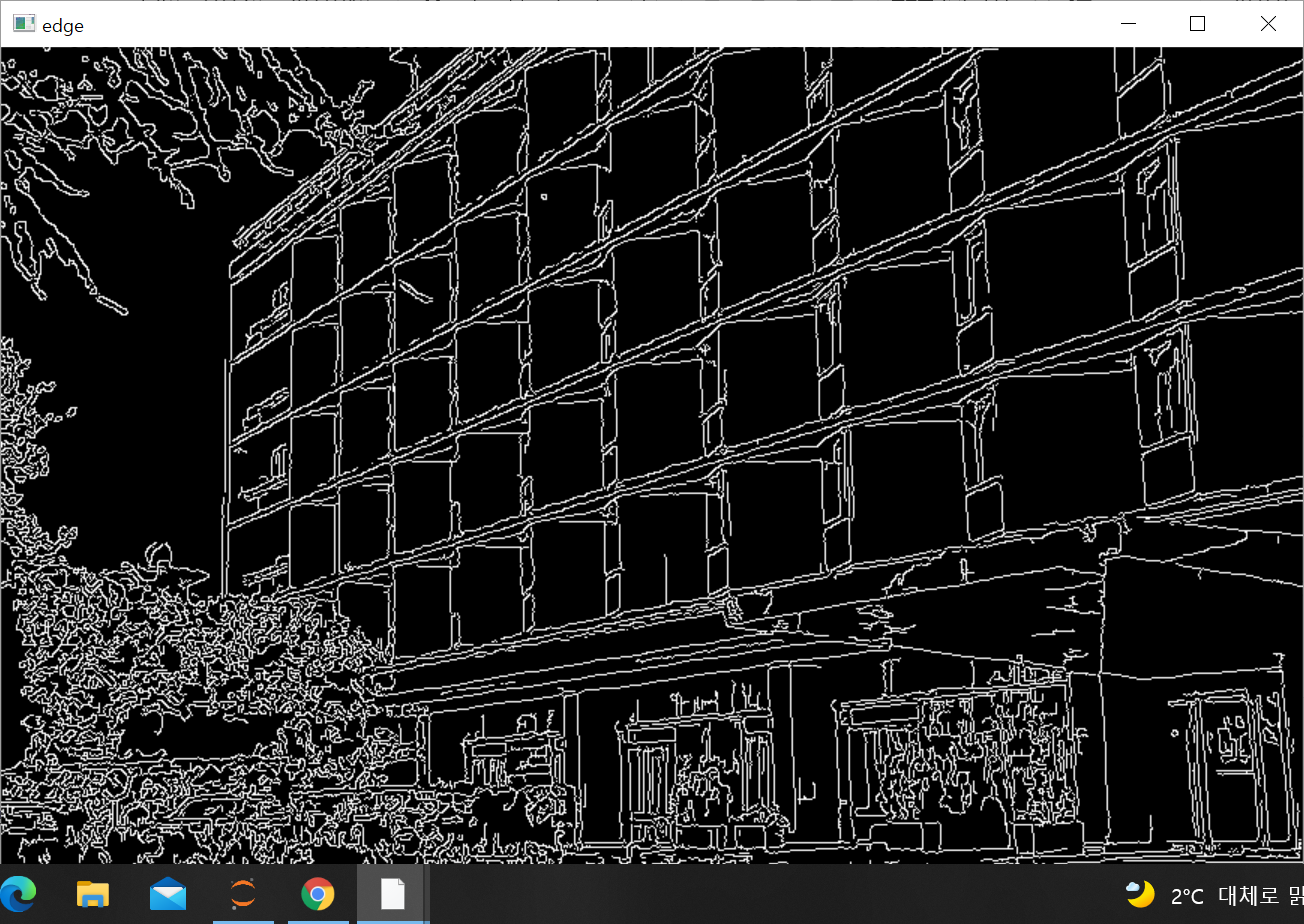
### 허프 변환 직선 검출
import math
src = cv2.imread('./data/building.jpg', cv2.IMREAD_GRAYSCALE)
if src is None:
print("image load failed")
sys.exit()
edge = cv2.Canny(src, 50, 150)
rho = 1
theta = math.pi/180
lines = cv2.HoughLines(edge, rho, theta, 250)
dst = cv2.cvtColor(edge, cv2.COLOR_GRAY2BGR)
if lines is not None:
for i in range(lines.shape[0]):
rho = lines[i][0][0]
theta = lines[i][0][1]
cos_t = math.cos(theta)
sin_t = math.sin(theta)
x0, y0 = rho*cos_t, rho * sin_t
alpha = 1000
pt1 = (int(x0 -alpha*sin_t), int(y0+alpha*cos_t))
pt2 = (int(x0 +alpha*sin_t), int(y0-alpha*cos_t))
cv2.line(dst, pt1, pt2, (0, 0, 255), 2, cv2.LINE_AA)
cv2.imshow('src', src)
cv2.imshow('edge', edge)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()-->
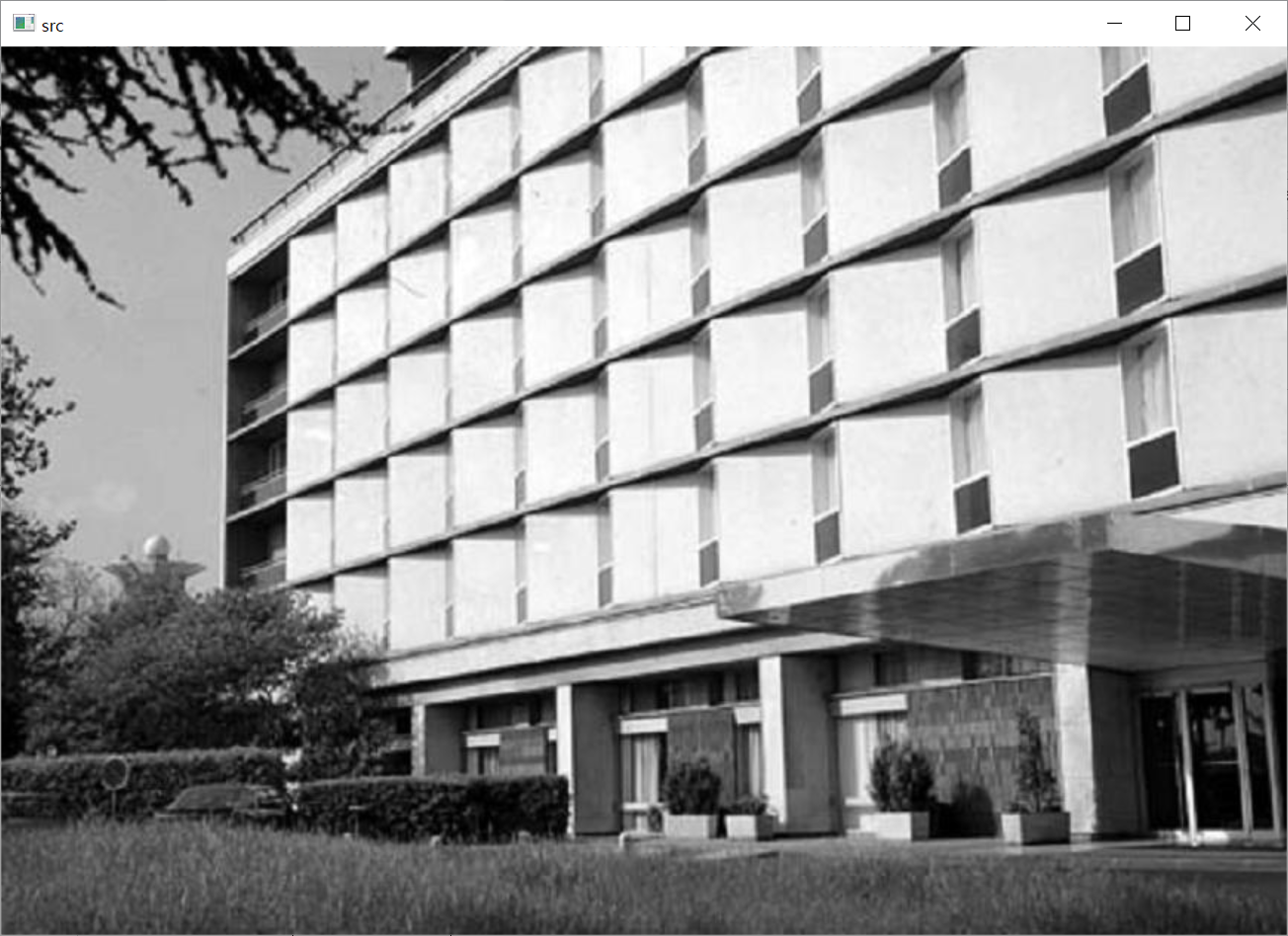

src = cv2.imread('./data/building.jpg', cv2.IMREAD_GRAYSCALE)
if src is None:
print("image load failed")
sys.exit()
edge = cv2.Canny(src, 50, 150)
dst = cv2.cvtColor(edge, cv2.COLOR_GRAY2BGR)
rho = 1
theta = math.pi/180
lines = cv2.HoughLinesP(edge, rho, theta, 160, minLineLength=50, maxLineGap=5)
if lines is not None:
for i in range(lines.shape[0]):
pt1 = (lines[i][0][0], lines[i][0][1])
pt2 = (lines[i][0][2], lines[i][0][3])
cv2.line(dst, pt1, pt2, (0, 0, 255), 2, cv2.LINE_AA)
cv2.imshow('src', src)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()-->


### 허프 변환 원 검출
src = cv2.imread('./data/coins.png', cv2.IMREAD_GRAYSCALE)
if src is None:
print("image load failed")
sys.exit()
blurred = cv2.blur(src, (3,3))
circles = cv2.HoughCircles(blurred, cv2.HOUGH_GRADIENT, dp=1, minDist=50, param1=150, param2=30 )
dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
if circles is not None:
for i in range(circles.shape[1]):
cx, cy, radius = circles[0][i]
cv2.circle(dst, (np.uint32(cx), np.uint32(cy)), np.uint32(radius), (0, 0, 255), 2)
cv2.imshow('src', src)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()-->


반응형
'IT > Python' 카테고리의 다른 글
| 【OpenCV 4】Day4_유용한 기능 (0) | 2022.02.13 |
|---|---|
| 【OpenCV 4】Day3_유용한 기능 (0) | 2022.01.26 |
| 【OpenCV 4】Day2_주요 기능 (0) | 2022.01.25 |
| 【OpenCV 4】Day1_기초 사용법 (0) | 2022.01.21 |
| 【딥러닝 시작하기】03 다양한 신경망 (0) | 2021.12.17 |



